Procesos del Sistema¶
En esta unidad se trabaja la administración de procesos: qué son, cómo los planifica el sistema operativo, la relación con los hilos, y cómo listar, priorizar o finalizar procesos desde Shell y PowerShell, así como el arranque del sistema y la administración de servicios.
Propuesta didáctica¶
En esta unidad vamos a trabajar el RA2 de ASO:
RA2. Administra procesos del sistema describiéndolos y aplicando criterios de seguridad y eficiencia.
Criterios de evaluación (RA2)¶
- CE2a: Se han descrito los procesos del sistema, sus estados y la función del planificador.
- CE2b: Se han diferenciado procesos e hilos y los mecanismos de sincronización.
- CE2c: Se han gestionado procesos desde el Shell (listar, prioridad, primer/segundo plano, finalizar).
- CE2d: Se han gestionado procesos desde PowerShell.
- CE2e: Se ha descrito el arranque del sistema y el papel de los servicios (systemd).
- CE2f: Se han administrado servicios con systemctl (iniciar, detener, habilitar, deshabilitar, estado).
- CE2g: Se ha desarrollado una herramienta de gestión del sistema (script con interfaz) y se ha documentado su uso.
Contenidos¶
Bloque 1 — Planificador y procesos (Sesión 1)
Tipos y estados de procesos. BCP. Multiprogramación. Algoritmos de planificación (FIFO, SJF, SRTF, prioridades, Round Robin).
Bloque 2 — Hilos y sincronización (Sesión 1–2)
Definición de hilo. Multihilo. Señales, mensajes, exclusión mutua. Herramientas gráficas (monitor del sistema, monitor de recursos).
Bloque 3 — Gestión de procesos en Shell (Sesión 2)
Comandos ps, pstree, top. Procesos en primer y segundo plano. jobs, fg, bg. Prioridad con renice. Finalizar procesos con kill.
Bloque 4 — Gestión de procesos en PowerShell (Sesión 2–3)
Get-Process, Stop-Process, Start-Process. Filtros y propiedades. Procesos en remoto.
Bloque 5 — Arranque del sistema y servicios (Sesión 3)
Secuencia de arranque (BIOS, bootloader, kernel, init). GRUB. Windows BCD. Daemons y systemd.
Bloque 6 — Administración de servicios (Sesión 3–4)
systemctl start/stop/restart, enable/disable, status. Unidades, destinos, enmascarar.
Actividades iniciales
- ¿Qué es un proceso y qué información guarda el sistema para cada uno?
- ¿Qué diferencia hay entre proceso en primer plano y en segundo plano?
- ¿Qué es un hilo y por qué puede interesar el multihilo?
- Nombra tres comandos para ver procesos en Linux.
- ¿Qué es un daemon o servicio y cuándo se inicia?
Programación de Aula (4 sesiones)¶
| Sesión | Contenidos | Actividades | Criterios |
|---|---|---|---|
| 1 | Planificador, estados, algoritmos. Hilos y sincronización. | Teoría y ejemplos de planificación | CE2a, CE2b |
| 2 | Gestión de procesos en Shell y PowerShell. | Prácticas en terminal | CE2c, CE2d |
| 3 | Arranque del sistema. Systemd y servicios. | Comandos systemctl, estados | CE2e, CE2f |
| 4 | Reto: Gestor del sistema con Python y tkinter. | Reto Procesos | CE2g |
1. Planificador: procesos, tipos, estados y estructura¶
Un proceso es una instancia de un programa en ejecución. Cada vez que se lanza un programa se crea un proceso; si se lanza el mismo programa dos veces, hay dos procesos distintos.
Cuando el usuario o una aplicación pide la ejecución de un programa, el sistema operativo debe proveer los recursos necesarios: espacio en memoria para instrucciones y datos, y control de ficheros y dispositivos de E/S.
Warning
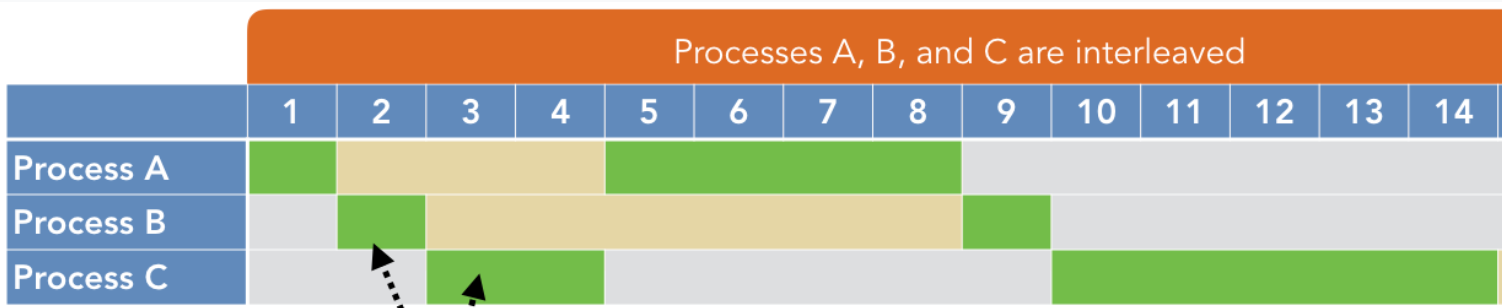
La CPU ejecuta un solo proceso en cada instante. Para optimizar el rendimiento se usan técnicas como la multiprogramación y el multihilado.
La multiprogramación es una técnica de multiplexación que permite la ejecución "simultánea" de múltiples procesos en un único procesador: en realidad hay un único proceso ejecutándose en el procesador a la vez, pero se produce una ilusión de paralelismo.
Estructura¶
Los procesos se estructuran de forma jerárquica. El sistema operativo lanza el primero y a partir de este se crean los demás.
El sistema operativo mantiene una estructura de control por proceso, llamada BCP (Bloque de Control de Proceso), que suele contener:
- PID (Process IDentifier): identificador único del proceso.
- Estado del proceso: listo, en ejecución o bloqueado.
- Registros del procesador: para restaurar el estado en cada conmutación.
- Gestión de memoria: espacio de direcciones y memoria asignada.
- Ficheros con los que opera el proceso.
- Procesadores en los que puede ejecutarse (en sistemas multiprocesador).
- En sistemas tipo UNIX: proceso padre y relaciones entre procesos.
- Estadísticas: tiempo de lanzamiento, tiempo activo, etc.

Tipos de procesos¶
Según la interacción con el usuario:
- Primer plano (foreground): requieren intervención del usuario.
- Segundo plano (background): se ejecutan sin intervención directa.
Según el modo de ejecución:
- Modo kernel: acceso privilegiado; la mayoría de procesos del SO.
- Modo usuario: procesos de usuario y aplicaciones.
Según quién los ejecuta:
- Procesos del sistema: lanzados por el SO.
- Procesos de usuario: lanzados por un usuario.
También se habla de procesos monohilo o multihilo.
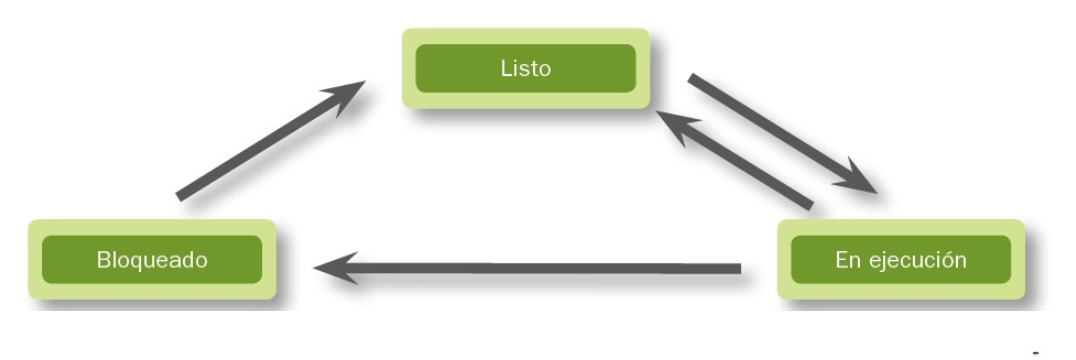
Estados¶
Tres estados básicos:
- En ejecución: el proceso tiene asignada la CPU.
- Listo (en espera): preparado para recibir el procesador; suele respetarse un orden de llegada.
- Bloqueado: esperando un recurso para poder continuar.
Note
Pueden existir más estados intermedios. Otros útiles: Parado (pausado por señal, p. ej. sleep), Zombie (hijo terminado que no puede comunicarse con el padre).
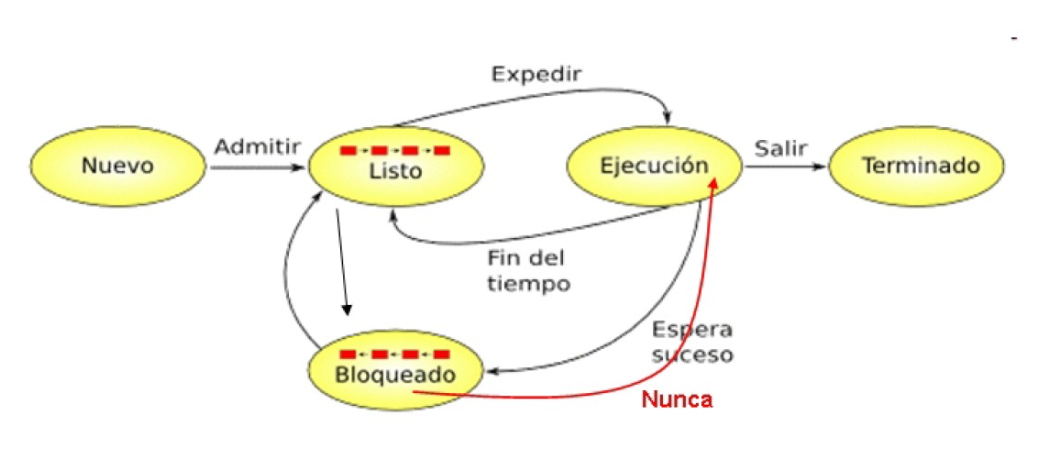
Transiciones de estados¶
Al ejecutar un programa:
- Se crea una entrada en la tabla de procesos.
- Se asigna un PID.
- Se asignan recursos y memoria.
- Se cargan páginas del programa en RAM.
- El proceso pasa a la lista de espera para que el planificador le conceda el procesador.
El planificador cambia los estados según el algoritmo, el quantum o la disponibilidad de recursos. La transición que no debe ocurrir (si el planificador es correcto) es pasar directamente de En espera o Bloqueado a En ejecución sin pasar por la concesión del planificador.
El planificador¶
El planificador decide qué proceso o hilo usa el procesador y cuánto tiempo. Los algoritmos suelen buscar:
- Equidad, eficacia, tiempo de respuesta y de regreso, y rendimiento.
Tipos de algoritmos de planificación:
FCFS/FIFO¶
- Primero en llegar, primero en ser servido; no expulsivo; fácil pero tiempo de espera alto.
- En FIFO, el proceso que solicita la CPU primero es el primero en obtenerla. Es el algoritmo de planificación más simple: se mantiene una cola por orden de llegada y el planificador asigna la CPU al proceso que está al frente de la cola. No es expulsivo: un proceso no es interrumpido hasta que termina su ráfaga de CPU (o se bloquea por E/S).
Características
- No expulsivo: el proceso mantiene la CPU hasta que termina su tiempo de ráfaga o se bloquea.
- Los trabajos se ejecutan siempre por orden de llegada.
- Fácil de implementar y de entender.
- Inconveniente: el tiempo de espera medio puede ser alto, sobre todo si primero llegan procesos largos.
Ejemplo numérico
Supongamos cuatro procesos que llegan en el orden P1, P2, P3, P4, con estos tiempos de ráfaga de CPU (en unidades de tiempo):
| Proceso | Tiempo de ráfaga (CPU) | Orden de llegada |
|---|---|---|
| P1 | 2 | 1º |
| P2 | 4 | 2º |
| P3 | 3 | 3º |
| P4 | 3 | 4º |
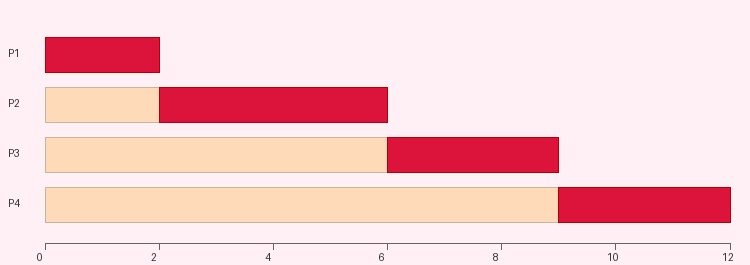
Con FIFO se ejecutan estrictamente en ese orden: primero P1, luego P2, luego P3, luego P4.
Cálculo de tiempos
- Tiempo de espera (waiting time): tiempo que el proceso pasa en la cola de listos antes de empezar a ejecutarse.
- Tiempo de retorno (turnaround time): tiempo desde la llegada hasta que el proceso termina (espera + tiempo de CPU).
En este ejemplo:
| Proceso | Tiempo de espera | Tiempo de retorno |
|---|---|---|
| P1 | 0 | 0 + 2 = 2 |
| P2 | 2 | 2 + 4 = 6 |
| P3 | 6 | 6 + 3 = 9 |
| P4 | 9 | 9 + 3 = 12 |
- Tiempo de espera medio = (0 + 2 + 6 + 9) / 4 = 17/4 = 4,25 unidades.
- Tiempo de retorno medio = (2 + 6 + 9 + 12) / 4 = 29/4 = 7,25 unidades.
P1 no espera; P2, P3 y P4 esperan más porque llegan después y hay que esperar a que terminen los anteriores. Si el primer proceso tuviera un tiempo de CPU muy grande, los demás sufrirían un tiempo de espera alto (efecto "convoy").
SJF (Shortest Job First)¶
- El de menor tiempo de ejecución primero; no expulsivo; minimiza tiempo de espera medio pero requiere conocer o estimar las ráfagas.
- Se selecciona para ejecutar el proceso con menor tiempo de ráfaga (duración de CPU) entre los que están listos. No es expulsivo: una vez que un proceso tiene la CPU, la mantiene hasta terminar su ráfaga.
Características
- No expulsivo.
- Minimiza el tiempo de espera medio cuando los trabajos tienen duraciones muy distintas.
- Requiere conocer (o estimar) el tiempo de CPU de cada proceso de antemano.
Ejemplo numérico
Mismos cuatro procesos que en FIFO, ordenados ahora por tiempo de ráfaga (de menor a mayor): P1(2), P3(3), P4(3), P2(4).
| Proceso | Tiempo de ráfaga (CPU) | Orden de ejecución |
|---|---|---|
| P1 | 2 | 1º |
| P3 | 3 | 2º |
| P4 | 3 | 3º |
| P2 | 4 | 4º |
| Proceso | Tiempo de espera | Tiempo de retorno |
|---|---|---|
| P1 | 0 | 2 |
| P2 | 8 | 12 |
| P3 | 2 | 5 |
| P4 | 5 | 8 |
- Tiempo de espera medio = (0 + 8 + 2 + 5) / 4 = 15/4 = 3,75 unidades.
- Tiempo de retorno medio = (2 + 12 + 5 + 8) / 4 = 27/4 = 6,75 unidades.
SRTF (Shortest Remaining Time First)¶
- Variante expulsiva de SJF: el de menor tiempo restante primero; expulsivo; buenos tiempos de espera cuando llegan trabajos cortos.
- Igual que SJF, pero expulsivo: si llega un proceso cuyo tiempo restante de CPU es menor que el del proceso que está ejecutando, se le cede la CPU al nuevo. Se elige siempre el proceso con menor tiempo restante entre los listos.
Características
- Expulsivo.
- Suele dar buenos tiempos de espera cuando hay trabajos cortos que llegan después.
- Requiere conocer (o estimar) el tiempo de CPU y las llegadas.
Ejemplo numérico
Cuatro procesos con llegada y ráfaga: P1(llegada 0, ráfaga 8), P2(1, 4), P3(2, 2), P4(3, 1). En cada instante se ejecuta el de menor tiempo restante.
| Proceso | Llegada | Ráfaga (CPU) |
|---|---|---|
| P1 | 0 | 8 |
| P2 | 1 | 4 |
| P3 | 2 | 2 |
| P4 | 3 | 1 |
Orden de ejecución: 0–1 P1; 1–2 P2 (4 < 7 restante de P1); 2–3 P3 (2 < 4); 3–4 P4 (1 < 2); 4–6 P3; 6–10 P2; 10–17 P1.
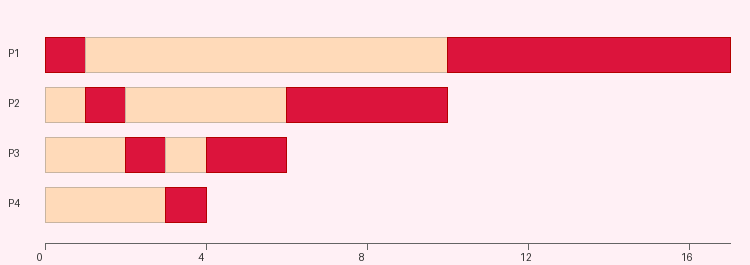
| Proceso | Tiempo de espera | Tiempo de retorno |
|---|---|---|
| P1 | 9 | 17 |
| P2 | 5 | 9 |
| P3 | 2 | 4 |
| P4 | 0 | 1 |
- Tiempo de espera medio = (9 + 5 + 2 + 0) / 4 = 4 unidades.
- Tiempo de retorno medio = (17 + 9 + 4 + 1) / 4 = 7,75 unidades.
Prioridades¶
- Los de mayor prioridad se ejecutan antes; puede ser expulsivo o no según la política; flexible para sistemas con prioridades (tiempo real, interactivos).
- Cada proceso tiene una prioridad (por ejemplo, un número: menor = más prioridad). El planificador elige el proceso listo con mayor prioridad. Si es no expulsivo, una vez en CPU termina su ráfaga; si es expulsivo, al llegar uno de mayor prioridad se le cede la CPU.
Prioridades no expulsivo
Mismos cuatro procesos con prioridad (1 = máxima): P1(prior 3, ráfaga 2), P2(1, 4), P3(2, 3), P4(4, 3). Orden de ejecución: P2 → P3 → P1 → P4.
| Proceso | Prioridad | Ráfaga | Orden |
|---|---|---|---|
| P2 | 1 | 4 | 1º |
| P3 | 2 | 3 | 2º |
| P1 | 3 | 2 | 3º |
| P4 | 4 | 3 | 4º |
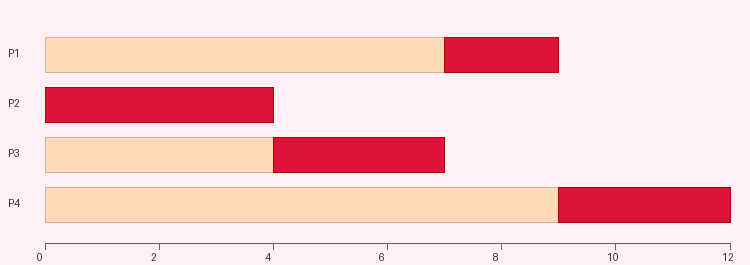
| Proceso | Tiempo de espera | Tiempo de retorno |
|---|---|---|
| P1 | 7 | 9 |
| P2 | 0 | 4 |
| P3 | 4 | 7 |
| P4 | 9 | 12 |
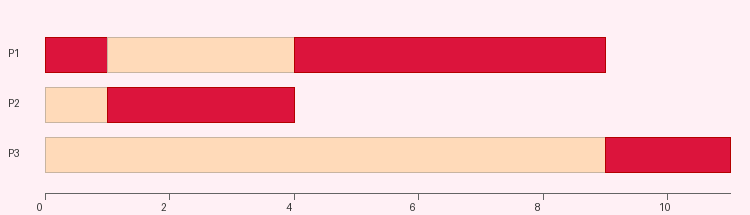
Prioridades expulsivo
P1(0, 5, prior 2), P2(1, 3, prior 1), P3(2, 2, prior 3). Al llegar P2 en 1, tiene prior 1 > 2, así que expulsa a P1. Orden: 0–1 P1; 1–4 P2; 4–9 P1; 9–11 P3.
Round Robin¶
- Turnos con un quantum fijo; expulsivo por tiempo; evita inanición y reparte la CPU entre todos.
- Todos los procesos listos forman una cola; cada uno recibe la CPU durante un quantum (p. ej. 2 unidades). Si no termina en ese tiempo, pasa al final de la cola y se ejecuta el siguiente. Así se reparte la CPU entre todos y no hay inanición.
Características
- Quantum fijo (reloj).
- Todos los procesos avanzan; los cortos terminan antes, los largos van por rachas.
- Suele aumentar el tiempo de espera medio respecto a FIFO o SJF cuando las ráfagas son muy dispares.
Ejemplo numérico
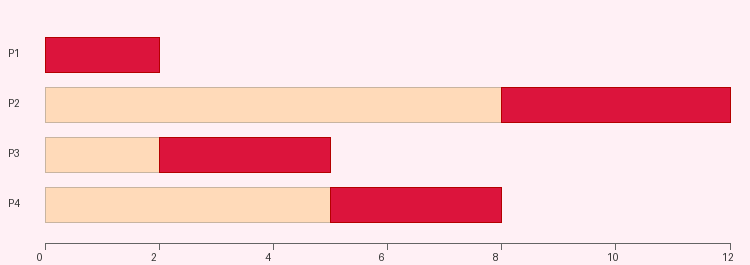
Mismos cuatro procesos P1(2), P2(4), P3(3), P4(3), quantum = 2. Orden de llegada P1, P2, P3, P4.
| Proceso | Ráfaga (CPU) | Quantum = 2 |
|---|---|---|
| P1 | 2 | 0–2 (termina) |
| P2 | 4 | 2–4, 8–10 (termina) |
| P3 | 3 | 4–6, 10–11 (termina) |
| P4 | 3 | 6–8, 11–12 (termina) |
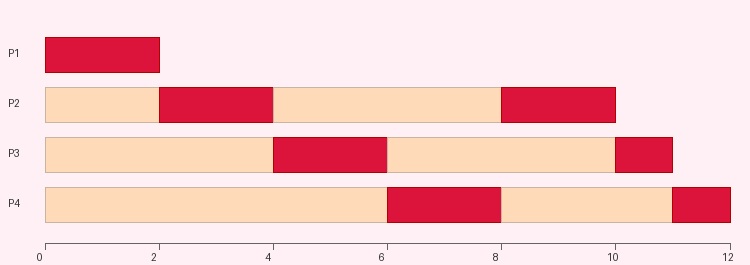
| Proceso | Tiempo de espera | Tiempo de retorno |
|---|---|---|
| P1 | 0 | 2 |
| P2 | 6 | 10 |
| P3 | 8 | 11 |
| P4 | 9 | 12 |
- Tiempo de espera medio = (0 + 6 + 8 + 9) / 4 = 23/4 = 5,75 unidades.
- Tiempo de retorno medio = (2 + 10 + 11 + 12) / 4 = 35/4 = 8,75 unidades.
2. Hilos¶
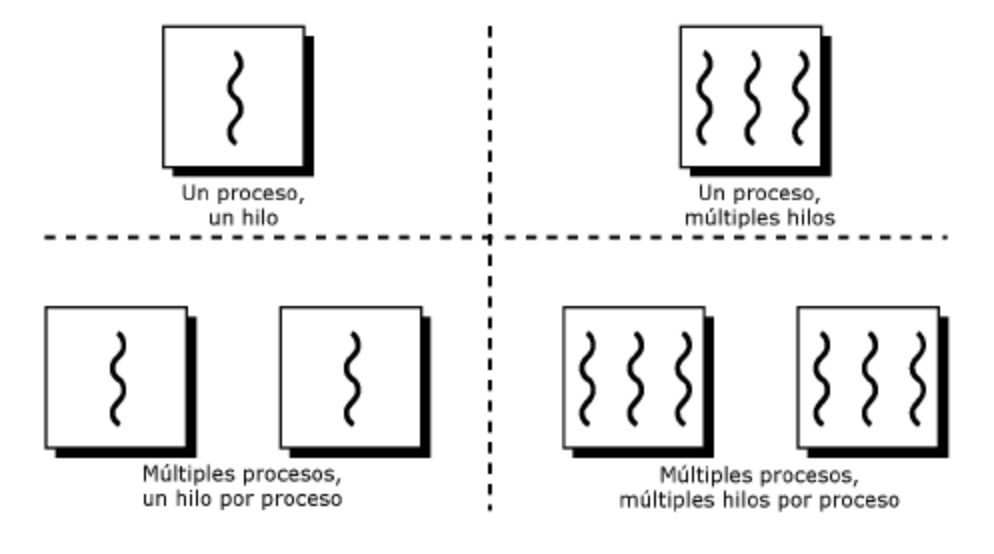
Un hilo (thread), hebra o proceso ligero es la secuencia de instrucciones más elemental que puede ser gestionada por el planificador.
NOTA
Un proceso puede ejecutarse como un solo hilo (una secuencia de instrucciones). En multihilo, partes del mismo proceso pueden ejecutarse en paralelo (varios hilos del mismo programa).
Diferencia principal: un proceso tiene su propio BCP y espacio de recursos; los hilos comparten el espacio de memoria y recursos del proceso. Por eso es importante la sincronización entre hilos.
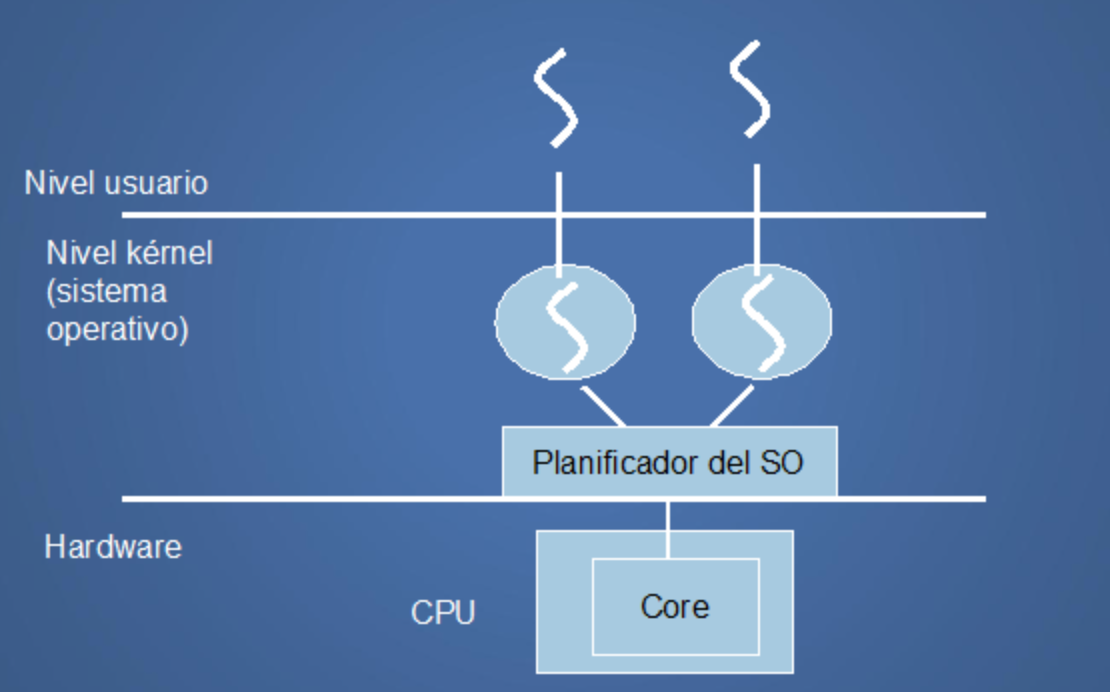
Cada hilo tiene identificador, contador de programa y pila propios. Tipos:
- Hilos a nivel de usuario: creados por el programador; el núcleo no los gestiona; la sincronización es responsabilidad del programa.
- Hilos a nivel de kernel: gestionados por el SO; en sistemas multinúcleo pueden ejecutarse en paralelo.
Ventajas de los hilos frente a procesos: más ligeros, cambio de contexto más barato, mayor agilidad si una parte se bloquea, y mejor aprovechamiento en multinúcleo.
Note
Un proceso multihilo no termina hasta que terminan todos sus hilos.
Sincronización y comunicación entre procesos¶
Procesos que deben comunicarse o sincronizarse usan señales y otros mecanismos:
- Mensajes: colas de mensajes para compartir información (incluso en equipos remotos).
- Señales: para sincronizar; cada señal tiene un comportamiento por defecto (p. ej. pausar o terminar). Se pueden enviar desde el SO (p. ej. Ctrl+C) o desde programas.
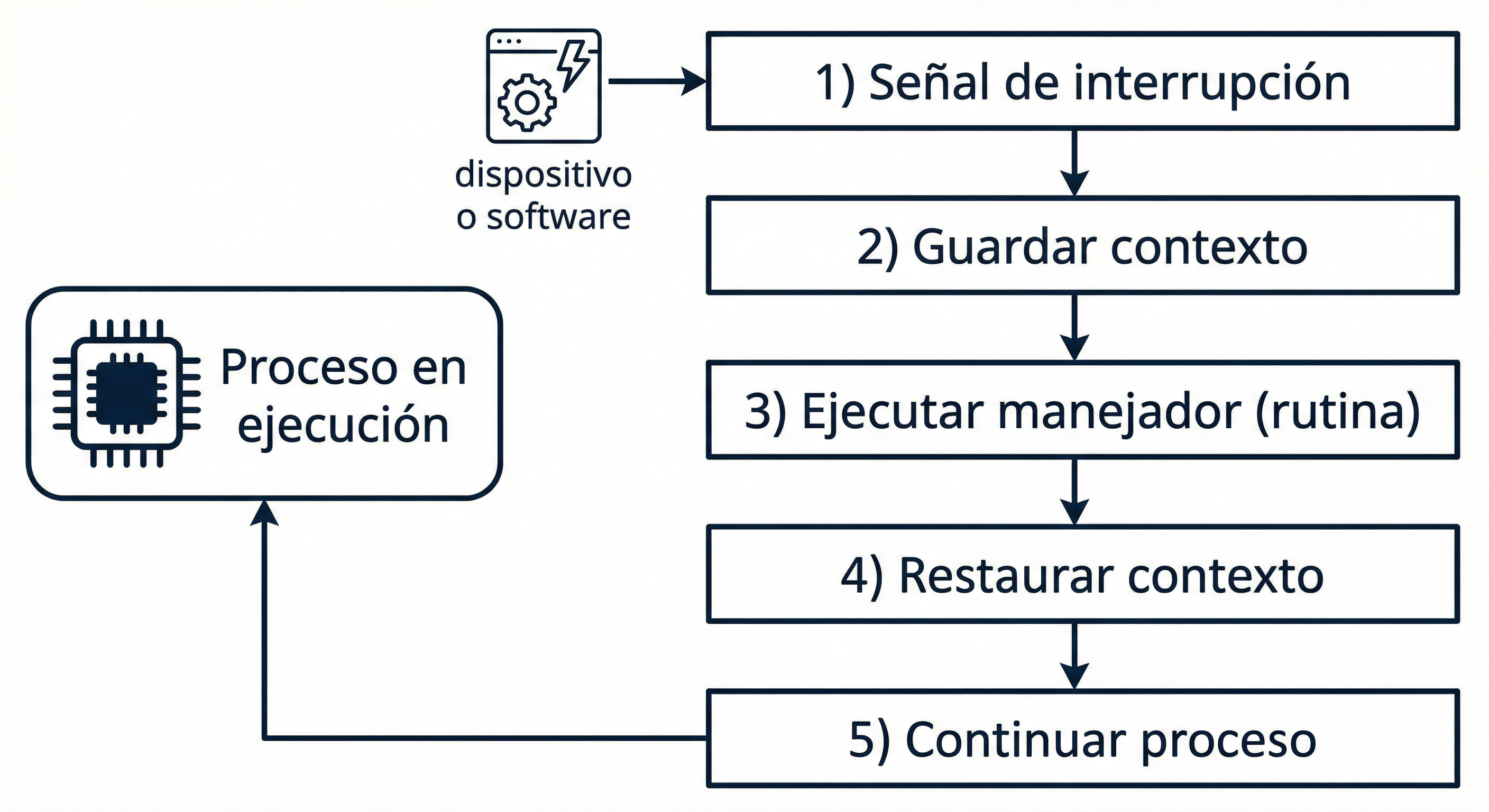
- Interrupciones y excepciones: las interrupciones son señales de dispositivos o software al procesador; las excepciones se producen por errores (p. ej. división por cero).
Interrupción
Una interrupción implica lo siguiente:
- Es una señal que llega al procesador para que detenga su tarea actual y atienda un suceso. Puede ser:
- De hardware: Por ejemplo, un dispositivo de E/S que requiere atención.
- De software: Por ejemplo, una llamada al sistema hecha por un programa.
- Cuando ocurre una interrupción:
- El procesador guarda el estado del proceso actual.
- Salta a la rutina específica que maneja esa interrupción (manejador).
- Tras atender la interrupción, restaura el estado y continúa con el proceso que fue interrumpido.
- Las excepciones funcionan de forma similar, pero son provocadas por condiciones anómalas durante la ejecución:
- Ejemplos: división por cero, acceso inválido a memoria, etc.
- El sistema debe reaccionar, por ejemplo, terminando el proceso o mostrando un error.
- Es posible inhibir las interrupciones por software en determinados tramos críticos, para evitar que una operación importante se quede a medias por una interrupción inesperada.
Casos y soluciones de sincronización¶
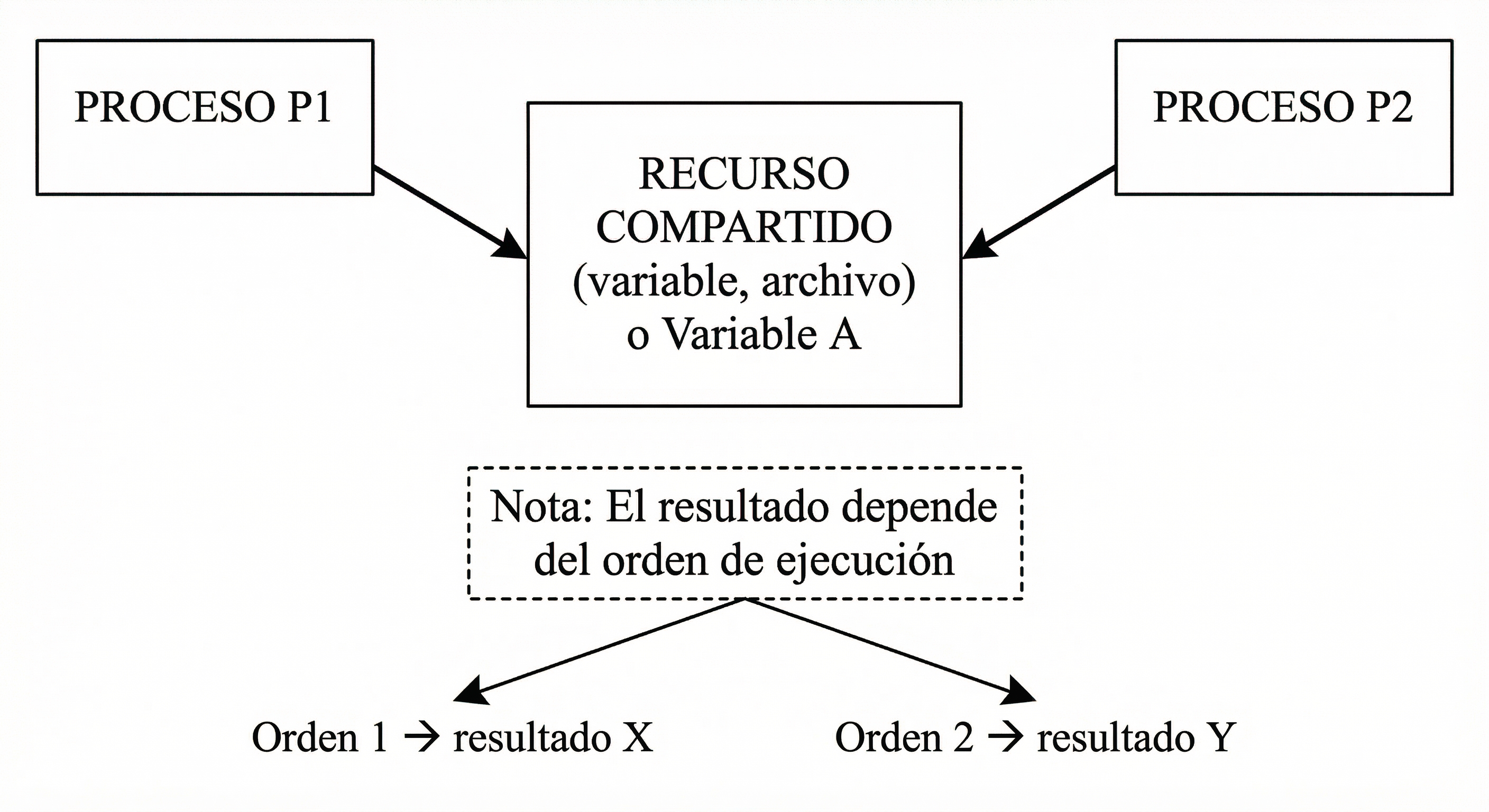
- Condiciones de competencia
Una condición de competencia ocurre cuando:
- Dos o más procesos acceden al mismo recurso (por ejemplo, una variable en memoria, un archivo o un dispositivo).
- El resultado final depende del orden en que se ejecutan las instrucciones de cada proceso.
- Por ejemplo:
- Si el planificador asigna la CPU primero a P1 y luego a P2, el valor del recurso será uno determinado.
- Si el orden es otro (primero P2, luego P1), el valor puede cambiar o se puede perder alguna actualización.
- Sin mecanismos de sincronización (como exclusión mutua, cerraduras, etc.):
- El programa se vuelve no determinista.
- Pueden aparecer fallos difíciles de reproducir.
Solución principal: Exclusión mutua
La solución más utilizada para evitar condiciones de competencia es la exclusión mutua mediante una sección crítica: solo un proceso puede modificar el recurso compartido en cada momento. Se suelen emplear mecanismos como semáforos, variables cerradura o monitores para gestionar este acceso.
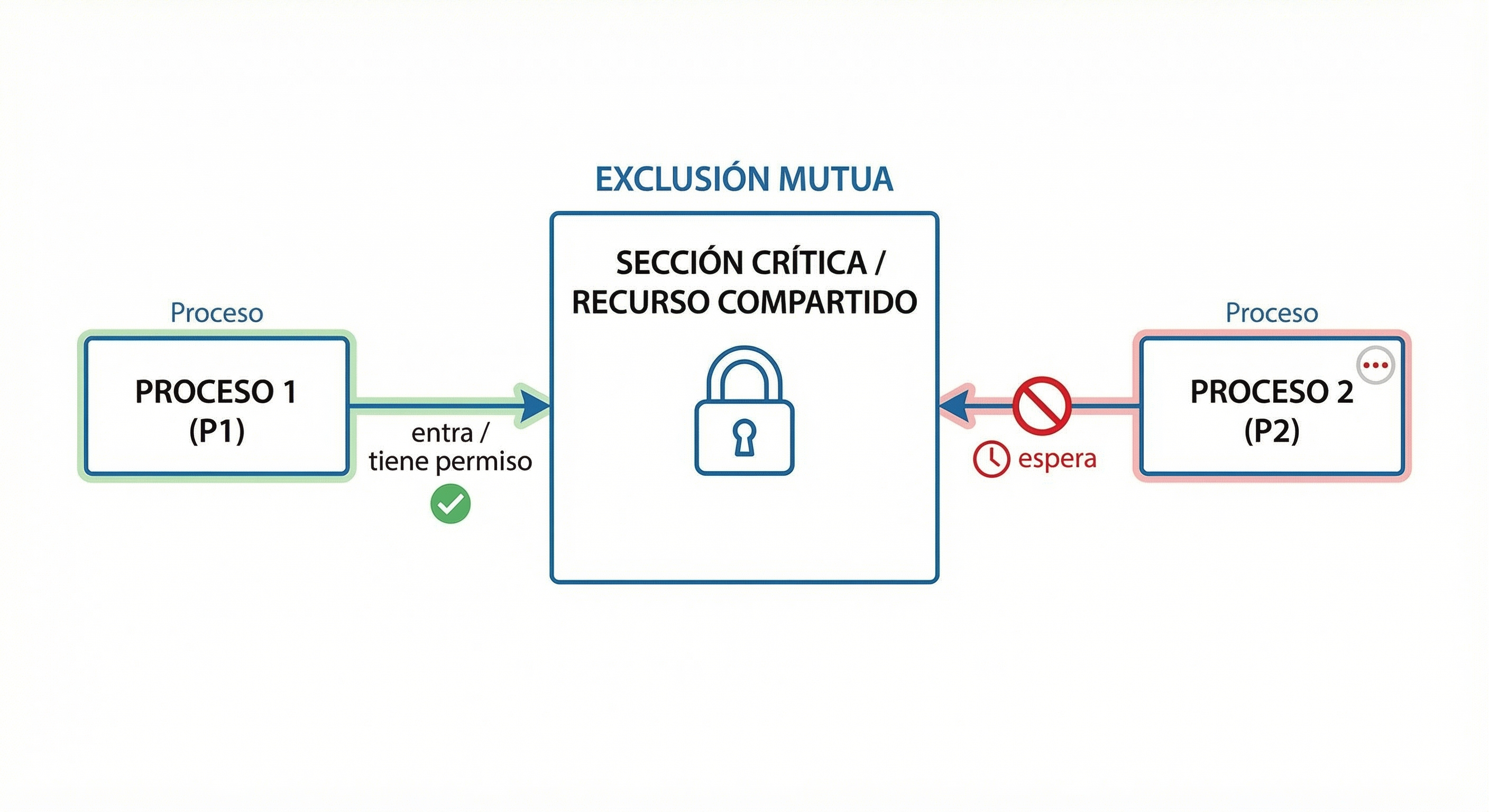
Exclusión mutua
La exclusión mutua evita que dos procesos accedan a la vez al mismo recurso (o a la misma zona de código que lo modifica). La sección crítica es el tramo del programa donde se usa ese recurso compartido. La regla es: solo un proceso puede estar dentro de su sección crítica en cada instante. Para entrar, el proceso debe “adquirir” el permiso (p. ej. mediante un semáforo o una cerradura); al salir, lo libera para que otro pueda entrar. Así se evitan condiciones de competencia sobre el recurso.
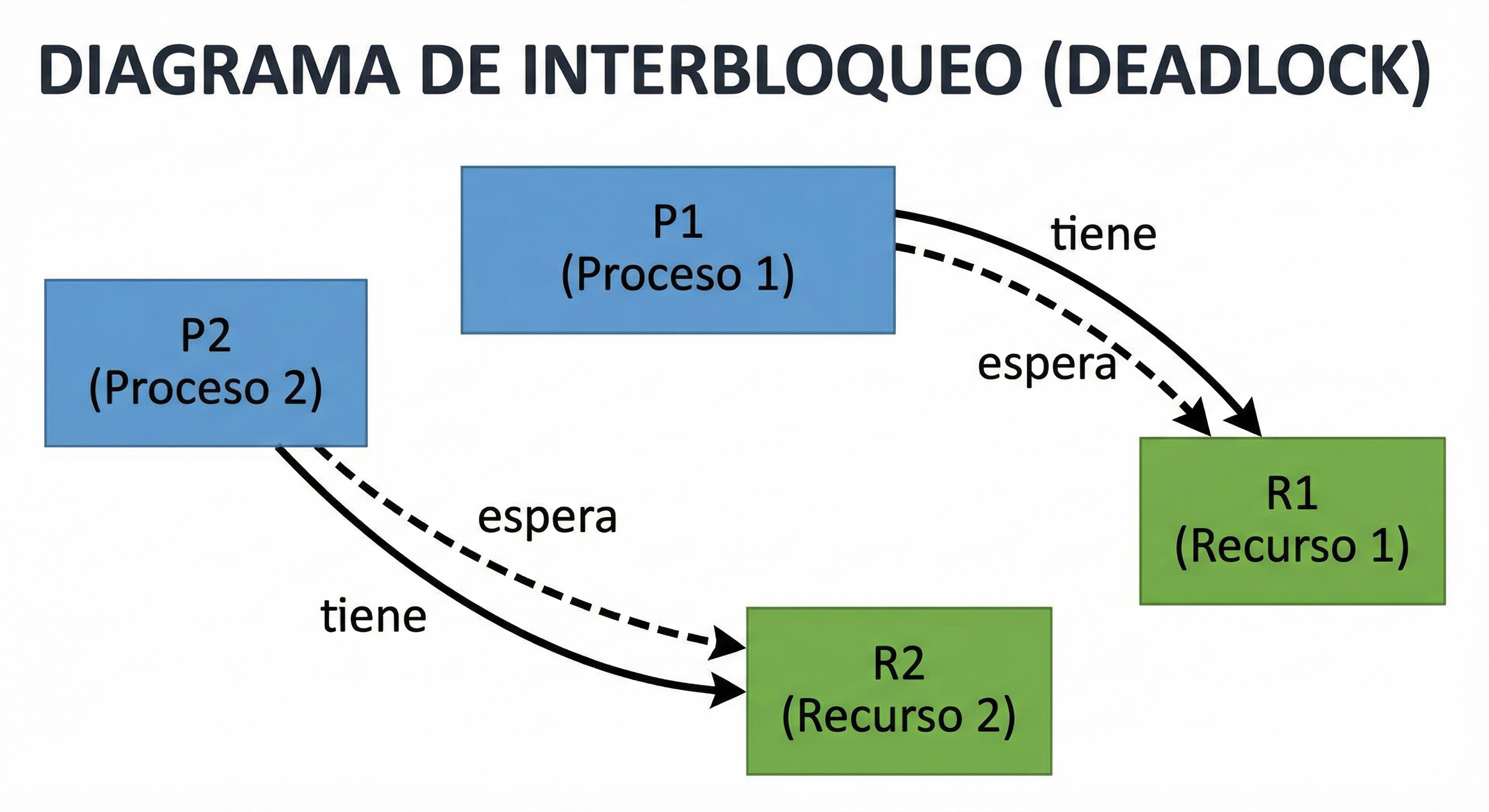
Interbloqueo (abrazo)
El interbloqueo se da cuando dos o más procesos se bloquean entre sí. Sus características principales son:
- Cada proceso posee un recurso y necesita otro que está en manos del otro proceso.
- Ningún proceso libera su recurso hasta conseguir el recurso que necesita.
- Se genera una situación de espera infinita (deadlock) y ningún proceso puede avanzar.
- Ejemplo típico:
- P1 tiene R1 y espera R2.
- P2 tiene R2 y espera R1.
Para evitar el interbloqueo se pueden emplear, entre otros, los siguientes métodos:
- Protocolos para el orden de solicitud de recursos.
- Uso de temporizadores (timeouts) para liberar recursos tras un cierto tiempo de espera.
- Detección y recuperación de situaciones de interbloqueo.
- Evitar que se cumplan simultáneamente las siguientes 4 condiciones típicas:
- Exclusión mutua
- Retención y espera
- No expropiación
- Espera circular
Herramientas gráficas¶
- GNU/Linux:
ksysguard(KDE),gnome-system-monitor(GNOME). En Debian/Ubuntu: Aplicaciones → Herramientas del sistema → Monitor del sistema.
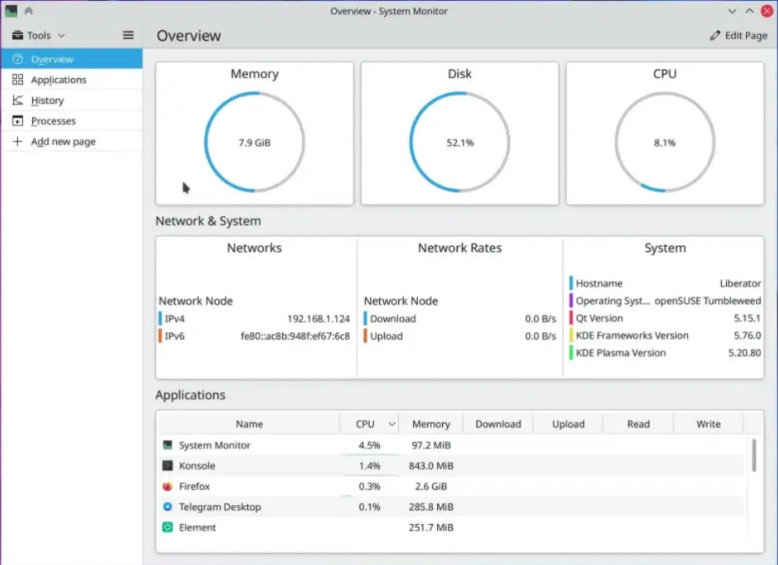
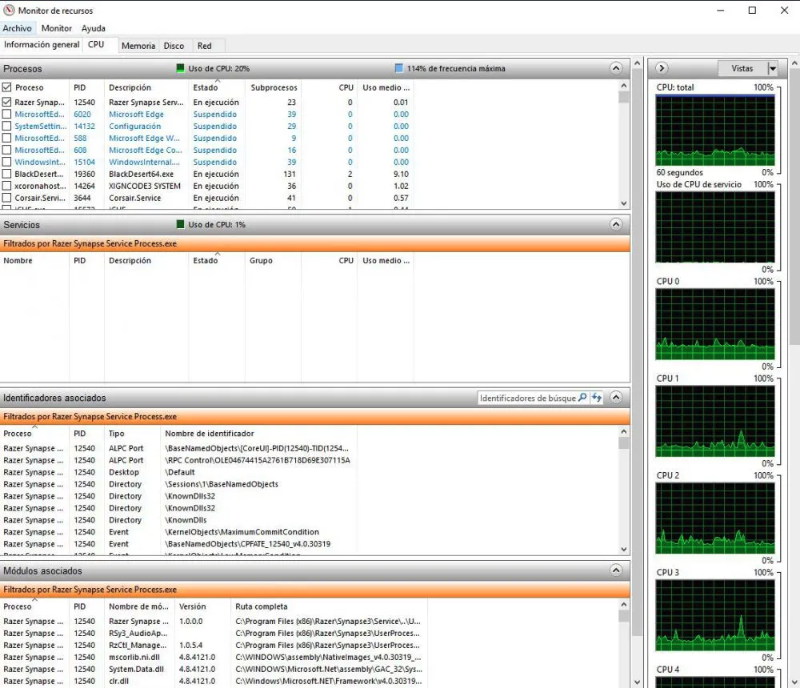
- Windows: Administrador de tareas → pestaña Rendimiento → Monitor de recursos (procesos y subprocesos).
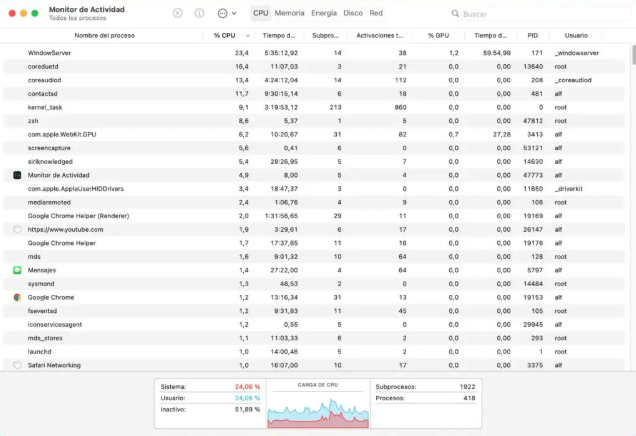
- macOS: Monitor de actividad, con subprocesos enumerados.
3. Gestión de procesos en Shell (Linux)¶
Cuando un proceso genera otro, se denomina padre al proceso original y hijo al generado. Por ejemplo, la terminal es en sí misma un proceso; al ejecutar un comando como ls -l, el sistema crea un proceso hijo del shell para ejecutar dicha instrucción.
Listado de comandos bash de procesos¶
Identificación de procesos¶
top # Listar todos los procesos de forma interactiva
htop # Listar todos los procesos de forma interactiva
ps all # Listar todos los procesos
pidof foo # Devolver el PID de todos los procesos foo
CTRL+Z # Suspender un proceso en primer plano
bg # Reanudar un proceso suspendido y ejecutarlo en segundo plano
fg # Traer el último proceso en segundo plano al primer plano
fg 1 # Traer al primer plano el proceso en segundo plano con ese PID
sleep 30 & # Pausar 30 segundos y ejecutar el proceso en segundo plano
jobs # Listar todos los trabajos en segundo plano
jobs -p # Listar todos los trabajos en segundo plano con su PID
lsof # Listar todos los archivos abiertos y el proceso que los usa
lsof -itcp:4000 # Devolver el proceso que escucha en el puerto 4000
Prioridad de procesos¶
Las prioridades van de -20 (máxima) a 19 (mínima).
nice -n -20 foo # Cambiar la prioridad del proceso por nombre
renice 20 PID # Cambiar la prioridad del proceso por PID
ps -o ni PID # Mostrar la prioridad del proceso con ese PID
Finalizar procesos¶
CTRL+C # Finalizar un proceso en primer plano
kill PID # Finalizar el proceso por PID de forma ordenada (señal TERM).
kill -9 PID # Finalizar forzadamente el proceso por PID (señal SIGKILL).
pkill foo # Finalizar el proceso por nombre de forma ordenada (señal TERM).
pkill -9 foo # Finalizar forzadamente el proceso por nombre (señal SIGKILL).
killall foo # Finalizar todos los procesos con ese nombre de forma ordenada.
Explicación de comandos principales¶
Comando ps¶
Muestra información sobre procesos en ejecución.
ps: procesos del usuario actual.- -a: procesos de todos los usuarios con terminal (tty).
- -x: procesos sin terminal asociado (p. ej. daemons).
- -e: todos los procesos.
- -f: formato extendido (PPID, STIME, etc.).
- -ef: todos con formato extendido.
- -u usuario: procesos de un usuario.
Columnas típicas: PID, terminal (TTY), tiempo de CPU, nombre del proceso.
Salida de ps -f (Ubuntu)
root@sor:/home/sor# ps -f
UID PID PPID C STIME TTY TIME CMD
root 2201 2200 0 16:24 pts/1 00:00:00 sudo su
root 2202 2201 0 16:24 pts/1 00:00:00 su
root 2203 2202 0 16:24 pts/1 00:00:00 bash
root 2337 2203 0 16:29 pts/1 00:00:00 ps -f
Comando pstree¶
Muestra los procesos en forma de árbol, mostrando las relaciones padre-hijo.
Salida de pstree (fragmento, Ubuntu)
root@sor:/home/sor# pstree
systemd─┬─ModemManager───3*[{ModemManager}]
├─agetty
├─containerd───8*[{containerd}]
├─containerd-shim─┬─tini─┬─nmbd
│ │ └─smbd─┬─cleanupd
│ │ └─smbd-notifyd
│ └─10*[{containerd-shim}]
├─containerd-shim─┬─s6-svscan─┬─s6-supervise───s6-linux-init-s
│ │ ├─s6-supervise───sshd.pam
│ │ └─...
├─cron
├─dbus-daemon
├─dockerd─┬─docker-proxy───...
│ └─...
├─login───bash
└─...
Comando top¶
Listado de procesos que se actualiza periódicamente. Permite ver evolución de CPU, memoria, número de tareas, etc. Con la tecla r se puede cambiar la prioridad (nice) de un proceso indicando su PID (solo root puede asignar prioridades negativas).
Salida de top (primeras líneas, Ubuntu)
top - 16:29:49 up 13 min, 2 users, load average: 0,00, 0,00, 0,00
Tasks: 160 total, 1 running, 159 sleeping, 0 stopped, 0 zombie
%Cpu(s): 0,0 us, 0,1 sy, 0,0 ni, 99,9 id, 0,0 wa, 0,0 hi, 0,0 si, 0,0 st
MiB Mem : 3902,3 total, 3206,3 free, 379,8 used, 466,8 buff/cache
MiB Swap: 0,0 total, 0,0 free, 0,0 used. 3522,5 avail Mem
PID USER PR NI VIRT RES SHR S %CPU %MEM TIME+ COMMAND
333 root 20 0 0 0 0 I 0,3 0,0 0:00.53 kworker/0:3-events
698 root 20 0 1861432 42112 27904 S 0,3 1,1 0:01.83 containerd
2339 root 20 0 11776 5376 3328 R 0,3 0,1 0:00.03 top
1 root 20 0 21948 12112 8528 S 0,0 0,3 0:00.81 systemd
2 root 20 0 0 0 0 S 0,0 0,0 0:00.00 kthreadd
4 root 0 -20 0 0 0 I 0,0 0,0 0:00.00 kworker/R-rcu_g
Primer plano y segundo plano¶
- Primer plano: el proceso con el que se interactúa; el terminal queda "bloqueado" hasta que termina.
- Segundo plano: se lanza con
&al final del comando (p. ej.sleep 10 &). El terminal sigue disponible.
Al lanzar en segundo plano se muestra un número entre corchetes (número de trabajo) y el PID.
sleep en segundo plano y jobs (Ubuntu)
root@sor:/home/sor# sleep 10 &
[1] 2366
root@sor:/home/sor# jobs
[1]+ Running sleep 10 &
jobs: lista los trabajos en segundo plano.fg %n: lleva el trabajona primer plano.bg %n: para pasar a segundo plano un proceso que está en primer plano, primero se suspende con Ctrl+Z y luego se ejecutabg %n.
Uso de fg y bg
Con un trabajo [1] en segundo plano, fg %1 lo trae a primer plano; si un proceso está detenido (Ctrl+Z), bg %1 lo reanuda en segundo plano.
Prioridad: renice¶
En Linux la prioridad (nice) va de -20 (más prioridad) a 20 (menos prioridad). Solo root puede usar valores negativos.
renice -n prioridad -p PID: cambia la prioridad del proceso con ese PID.renice -g: por grupo.renice -u: por usuario.
Para ver la prioridad: ps ax -o pid,ni,cmd (columna ni = nice).
renice (Ubuntu, como root)
Se lanza sleep en segundo plano; con ps ax -o pid,ni,cmd | grep sleep se localiza el PID y la prioridad (ni); luego renice -n 10 -p PID cambia la prioridad:
root@sor:/home/sor# sleep 10 &
[1] 2366
root@sor:/home/sor# jobs
[1]+ Running sleep 10 &
root@sor:/home/sor# ps ax -o pid,ni,cmd | grep sleep
2394 0 grep --color=auto sleep
[1]+ Done sleep 10
root@sor:/home/sor# renice -n 10 -p 2394
Sobre este ejemplo
En este ejemplo el proceso sleep terminó antes de ejecutar renice. Para practicar renice conviene usar un proceso de mayor duración (p. ej. sleep 60 &) y aplicar renice al PID de ese proceso, no al de grep.
Finalizar procesos: kill¶
kill PID # solicitud de terminación (SIGTERM, 15)
kill -9 PID # terminación forzada (SIGKILL)
kill -1 PID # SIGHUP, reiniciar proceso
killall nombre_programa # termina todos los procesos con ese nombre
kill (Ubuntu)
Se lanza un proceso en segundo plano, se obtiene su PID y se finaliza con kill (señal 15, terminación ordenada):
root@sor:/home/sor# sleep 120 &
[1] 2450
root@sor:/home/sor# kill 2450
root@sor:/home/sor# jobs
[1]+ Terminated sleep 120
Terminación forzada
Si el proceso no responde a kill, se puede forzar con kill -9 PID (SIGKILL). Con killall nombre se finalizan todos los procesos cuyo nombre coincida (p. ej. killall sleep).
4. Gestión de procesos en PowerShell¶
Para listar cmdlets relacionados con procesos: Get-Command *process*.
Obtener procesos¶
Get-Process(sin parámetros): procesos del equipo local.Get-Process | Sort-Object CPU -Descending | Select-Object -First 10: los 10 que más CPU consumen.Get-Process -Id PID: por identificador (si no existe, da error).Get-Process -Name patrón: por nombre; admite comodines (p. ej.ex*).Get-Process -Name a*,b*: varios nombres.(Get-Process -Name pwsh).Path,(Get-Process -Name pwsh).WS: propiedades concretas (ruta, memoria de trabajo).Get-Process -Name PowerShell -ComputerName localhost, Server01, Server02: procesos en equipos remotos (parámetro ComputerName). Para ver el equipo:Format-Table -Property ID, ProcessName, MachineName.
El proceso Idle (id 0) representa el tiempo en que la CPU no está trabajando.
Get-Process: listar y filtrar
Listar procesos por nombre y los 5 que más CPU consumen:
PS C:\> Get-Process -Name pwsh | Select-Object Id, ProcessName, CPU, WorkingSet
Id ProcessName CPU WorkingSet
-- ----------- --- ----------
1234 pwsh 12,50 185654321
PS C:\> Get-Process | Sort-Object CPU -Descending | Select-Object -First 5 Id, ProcessName, CPU
Id ProcessName CPU
-- ----------- ---
456 explorer 125,30
789 chrome 98,12
1234 pwsh 12,50
Propiedades de un proceso
Obtener la ruta y la memoria de trabajo (WS) de un proceso por nombre:
PS C:\> (Get-Process -Name pwsh).Path
C:\Program Files\PowerShell\7\pwsh.exe
PS C:\> (Get-Process -Name pwsh).WorkingSet
185654321
Detener procesos¶
Stop-Process -Name nombreoStop-Process -Id PID.Stop-Process -Name t*,e* -Confirm: pide confirmación por cada coincidencia.- Procesos que no responden:
Get-Process | Where-Object { $_.Responding -eq $false } | Stop-Process. - En remoto (Stop-Process no tiene ComputerName):
Invoke-Command -ComputerName Server01 { Stop-Process Powershell }.
Stop-Process: finalizar por nombre o PID
PS C:\> Get-Process -Name notepad
Id ProcessName
-- -----------
5678 notepad
PS C:\> Stop-Process -Id 5678
PS C:\> Stop-Process -Name notepad -Force
Sobre -Force
El parámetro -Force permite terminar procesos que no responden sin pedir confirmación.
Iniciar procesos¶
Start-Process -FilePath ruta\ejecutable(p. ej.C:\windows\notepad.exe).- Para abrir aplicaciones por protocolo:
Start-Process Microsoft-edge://.
Start-Process: abrir aplicación
PS C:\> Start-Process notepad
PS C:\> Start-Process -FilePath "C:\Windows\System32\notepad.exe" -ArgumentList "C:\temp\notas.txt"
PS C:\> Start-Process "https://www.ejemplo.org"
Sobre Start-Process
Sin parámetros adicionales, Start-Process notepad abre el Bloc de notas. Con -ArgumentList se pasan argumentos al ejecutable. Con una URL se abre el navegador por defecto.
5. Arranque del sistema y servicios¶
El arranque (boot) es la secuencia que pone en marcha el hardware, carga el gestor de arranque, el kernel y, por último, los servicios del sistema. En la práctica interesa conocer las cuatro fases (comunes a Linux) y qué son los servicios y systemd.
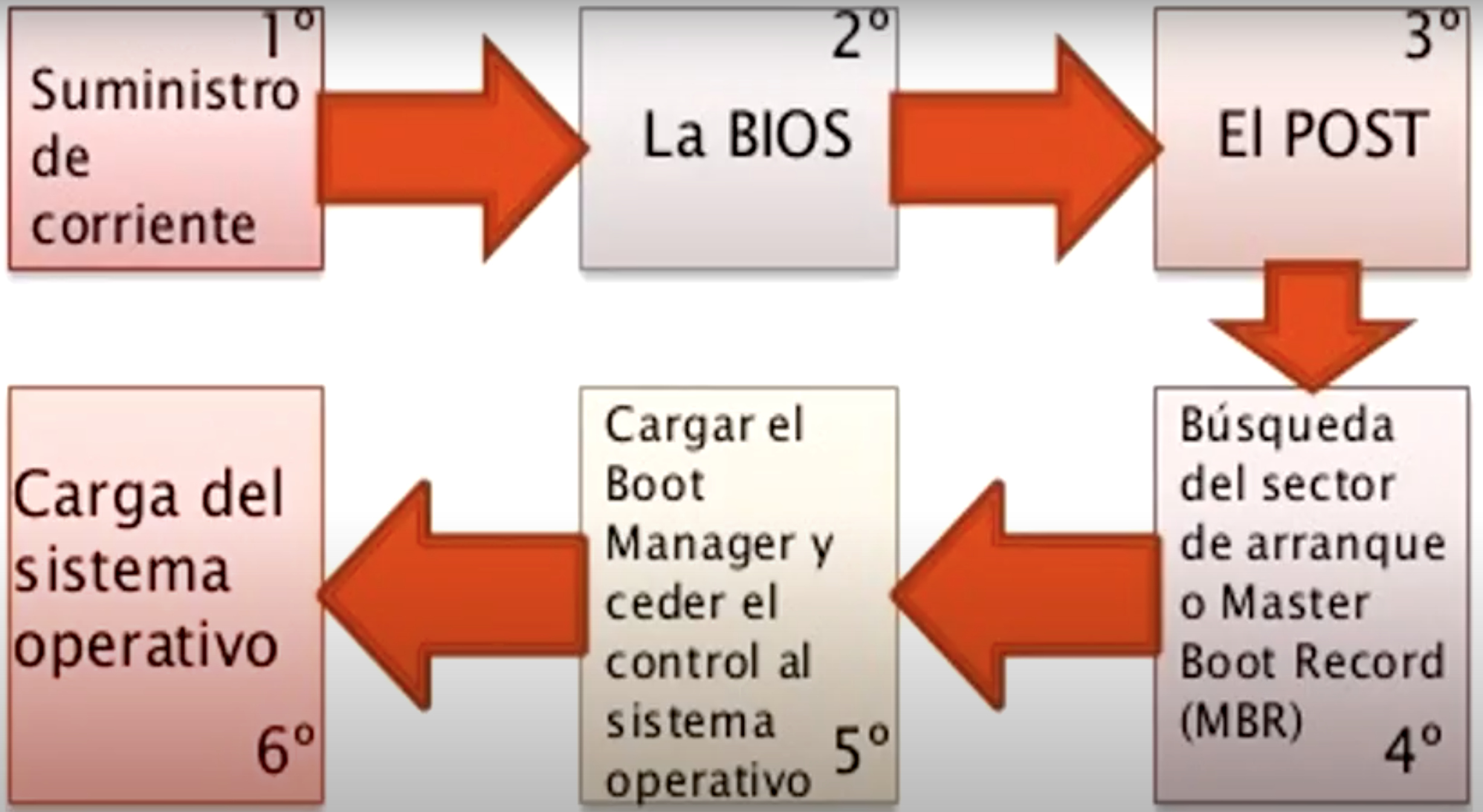
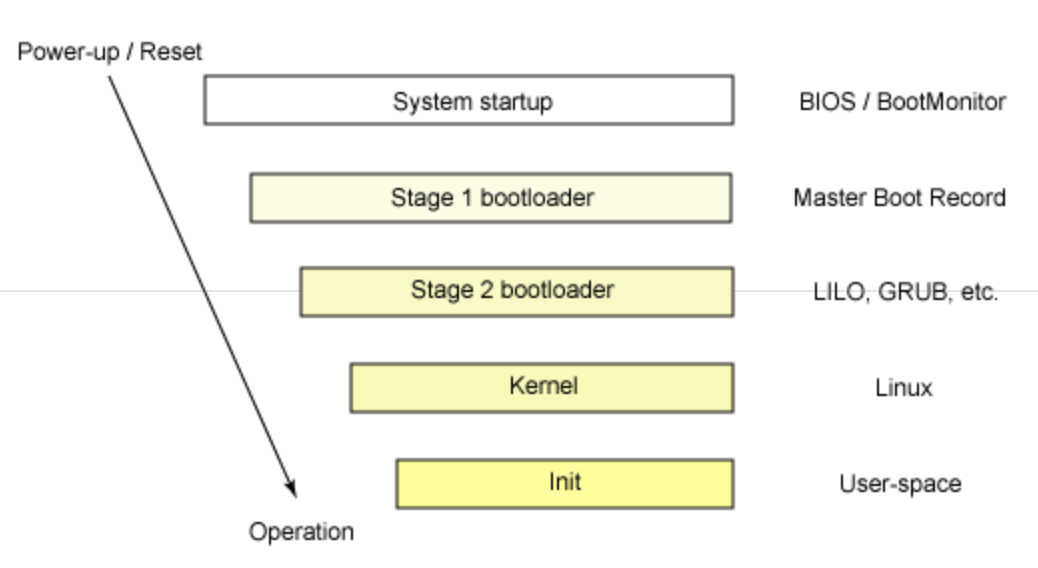
Arranque en Linux (4 etapas)¶
- BIOS/UEFI — POST, detección de hardware y carga del cargador de arranque desde MBR o GPT.
- Cargador de arranque (GRUB) — Lee la configuración (p. ej.
/boot/grub/grub.cfg,/etc/default/grub); muestra menú para elegir kernel;update-grubaplica cambios. LILO es una alternativa antigua que escribe la configuración en el MBR. - Kernel — Se carga y descomprime; initrd aporta drivers; el kernel arranca el primer proceso de usuario (init).
- Init / systemd — Arranque en espacio de usuario: montaje de sistemas de archivos y puesta en marcha de servicios (daemons).
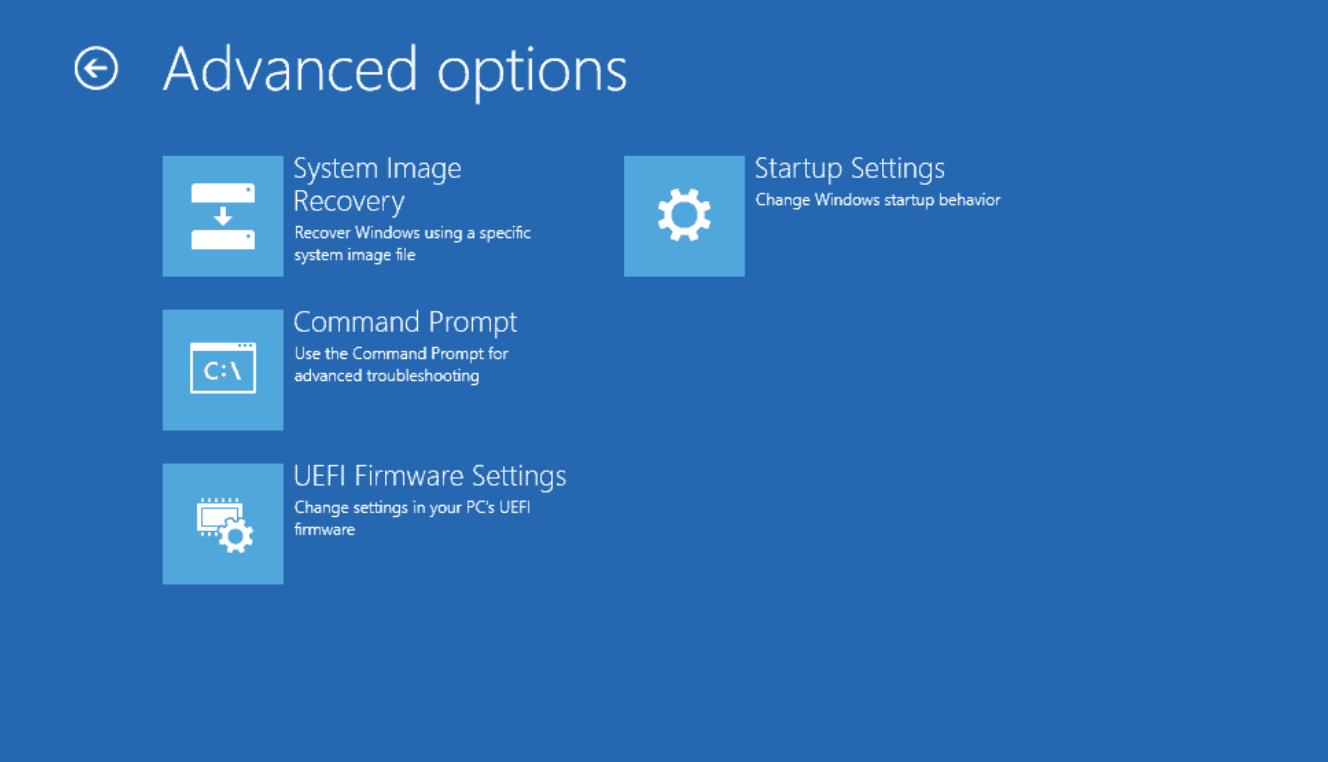
Arranque en Windows¶
El arranque se controla con BCD (Boot Configuration Data, \boot\BCD) y Bootmgr.exe. Secuencia resumida: BIOS → MBR → Bootmgr → BCD → menú → carga del kernel (Winload, ntoskrnl) y de los subsistemas (smss, winlogon) hasta la pantalla de inicio de sesión. Para editar opciones de arranque: msconfig, bcdedit o PowerShell.
Daemon y servicio¶
Un daemon (Linux/UNIX) o servicio (Windows) es un programa que se ejecuta en segundo plano, sin ventana para el usuario, y que suele iniciarse con el sistema (p. ej. servidor web, SSH, impresoras). En Linux los logs suelen estar en /var/log/ o vía syslog.
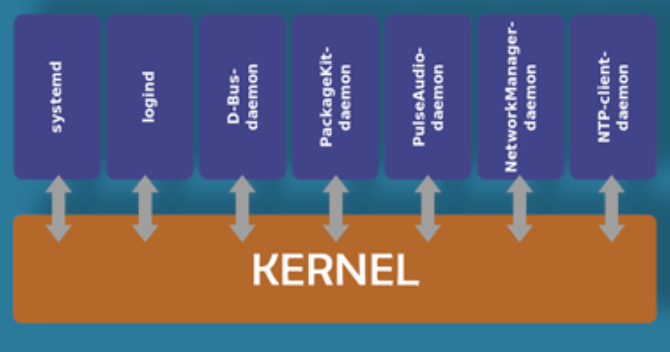
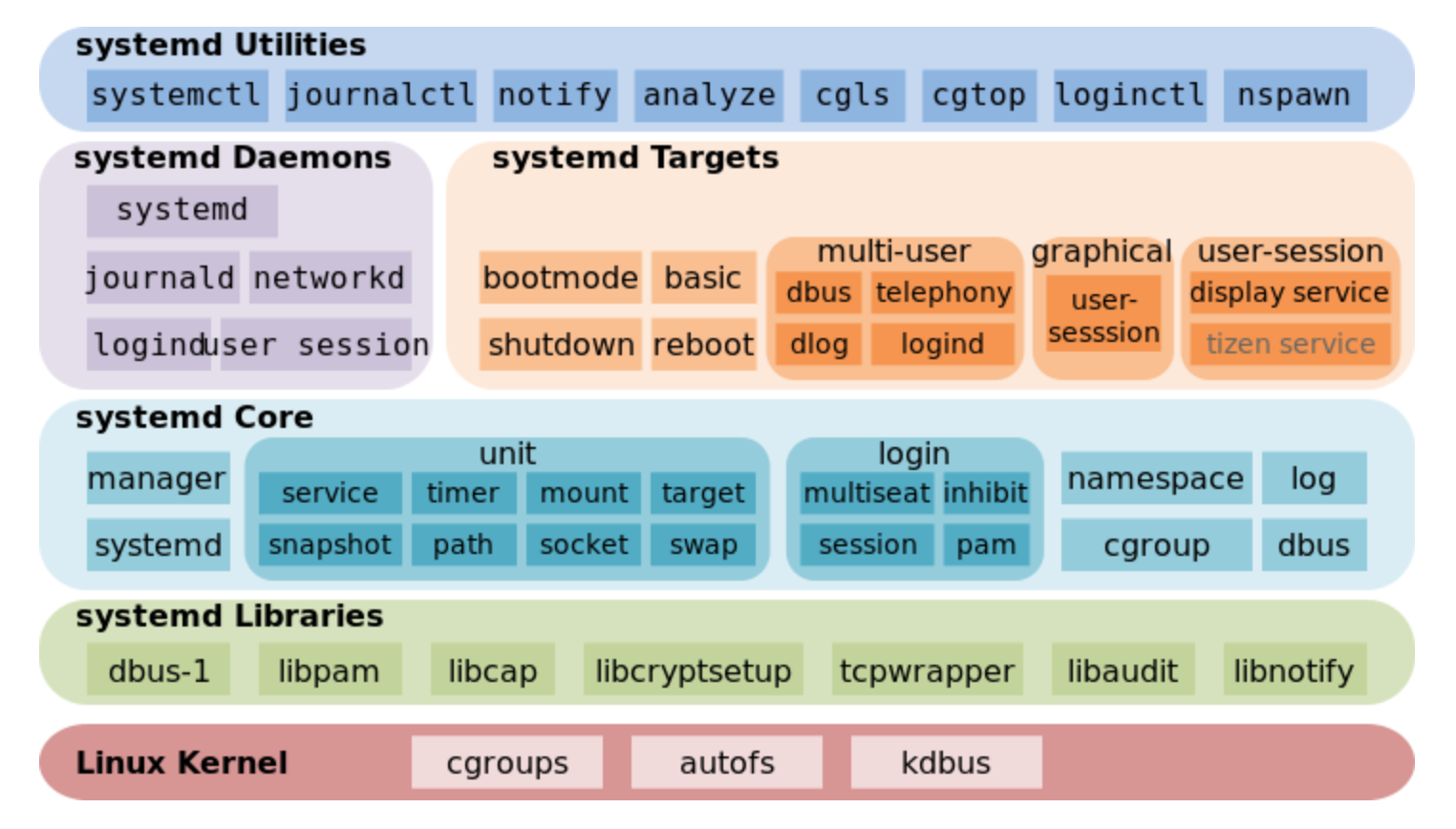
Systemd¶
Systemd es el gestor de sistema e init en la mayoría de distribuciones Linux actuales: unifica el arranque y la gestión de servicios, es el primer proceso en espacio de usuario (PID 1) y se administra con systemctl (ver siguiente sección).
6. Administración de servicios (systemd)¶
Iniciar y detener¶
sudo systemctl start nombre.service
sudo systemctl stop nombre.service
sudo systemctl restart nombre.service
sudo systemctl reload nombre.service
sudo systemctl reload-or-restart nombre.service
Iniciar, reiniciar y detener un servicio
$ sudo systemctl start ssh
$ sudo systemctl status ssh
● ssh.service - OpenBSD Secure Shell server
Loaded: loaded (/lib/systemd/system/ssh.service; enabled)
Active: active (running) since Mon 2024-01-15 10:00:00 UTC; 5s ago
$ sudo systemctl stop ssh
Sobre el nombre de la unidad
Se puede omitir el sufijo .service (p. ej. ssh en lugar de ssh.service).
Habilitar y deshabilitar en el arranque¶
sudo systemctl enable nombre.service
sudo systemctl disable nombre.service
enable no inicia el servicio
enable solo hace que el servicio se inicie en el próximo arranque. Para ponerlo en marcha en la sesión actual hay que usar además start.
Habilitar y deshabilitar en el arranque
$ systemctl is-enabled ssh
enabled
$ sudo systemctl disable ssh
$ systemctl is-enabled ssh
disabled
$ sudo systemctl enable ssh
Estado¶
systemctl status nombre.service
systemctl is-active nombre.service
systemctl is-enabled nombre.service
systemctl is-failed nombre.service
Consultar estado de un servicio
$ systemctl is-active nginx
active
$ systemctl is-enabled nginx
enabled
$ systemctl is-failed nginx
inactive
Listar unidades¶
systemctlosystemctl list-units: unidades activas.systemctl list-units --all: todas las cargadas.systemctl list-units --type=service: solo servicios.systemctl list-unit-files: archivos de unidad y estado (enabled, disabled, static, masked).
Listar servicios activos y archivos de unidad
$ systemctl list-units --type=service | head -15
UNIT LOAD ACTIVE SUB DESCRIPTION
cron.service loaded active running Regular background program
dbus.service loaded active running D-Bus System Message Bus
ssh.service loaded active running OpenBSD Secure Shell server
systemd-journald.service loaded active running Journal Service
...
$ systemctl list-unit-files --type=service | grep -E 'ssh|nginx|cron'
cron.service enabled
nginx.service disabled
ssh.service enabled
Otras operaciones¶
systemctl cat nombre.service: contenido del archivo de la unidad.systemctl list-dependencies nombre.service: dependencias.systemctl show nombre.service: propiedades.- Enmascarar (impedir que se inicie):
sudo systemctl mask nombre.service. Desenmascarar:sudo systemctl unmask nombre.service. - Editar:
sudo systemctl edit nombre.service(fragmento override) osudo systemctl edit --full nombre.service. Tras cambios:sudo systemctl daemon-reload.
Ver dependencias y enmascarar
$ systemctl list-dependencies ssh.service | head -10
ssh.service
● ├─system.slice
● └─basic.target
● ├─...
$ sudo systemctl mask nombre.service
Created symlink /etc/systemd/system/nombre.service → /dev/null.
$ sudo systemctl unmask nombre.service
Removed /etc/systemd/system/nombre.service.
Destinos (runlevels)¶
systemctl get-default: destino por defecto.systemctl set-default graphical.target: cambiar destino por defecto.systemctl list-unit-files --type=target: destinos disponibles.sudo systemctl isolate multi-user.target: cambiar a modo multiusuario (sin gráfico).sudo systemctl rescue,sudo systemctl halt,sudo systemctl poweroff,sudo systemctl reboot: atajos para rescate, apagado y reinicio.
Destino por defecto y destinos disponibles
$ systemctl get-default
graphical.target
$ systemctl list-unit-files --type=target | grep -E 'graphical|multi-user'
graphical.target static
multi-user.target static
$ sudo systemctl set-default multi-user.target
Created symlink /etc/systemd/system/default.target → /usr/lib/systemd/system/multi-user.target.
Actividades¶
En esta unidad se plantean dos retos individuales de depuración: un script Python con interfaz gráfica (tkinter) que integra comandos de gestión de procesos. El alumnado elige uno de los dos según el entorno (Linux/WSL o Windows). Cada reto tiene una puntuación máxima de 30 puntos y se evalúa según los criterios indicados.
Antes de los retos
Si no tienes experiencia con Python, puedes apoyarte en la Introducción a Python antes de abordar los enunciados.
RG601: Gestor de procesos con Shell (Linux / WSL). Ampliación +0,25 de la nota final.¶
Puntuación: 30 puntos
Criterios evaluados: CE2c (gestión de procesos desde el Shell), CE2g (herramienta de gestión y documentación)
Modalidad: Individual
Entorno: Linux o WSL (comandos: ps, pstree, jobs, kill, renice).
Depuración de un script Python con interfaz gráfica que utiliza comandos Shell para listar procesos, mostrar el árbol de procesos, listar trabajos en segundo plano, finalizar un proceso por PID y cambiar la prioridad (renice). El enunciado incluye código con errores que hay que identificar, justificar y corregir.
Ver enunciado del reto — Shell (RG601)
RG602: Gestor de procesos con PowerShell (Windows). Ampliación +0,25 de la nota final.¶
Puntuación: 30 puntos
Criterios evaluados: CE2d (gestión de procesos desde PowerShell), CE2g (herramienta de gestión y documentación)
Modalidad: Individual
Entorno: Windows con PowerShell (cmdlets: Get-Process, Stop-Process, Start-Process).
Depuración de un script Python con interfaz gráfica que utiliza cmdlets de PowerShell para listar procesos, mostrar los que más CPU consumen, finalizar un proceso por PID e iniciar un proceso. El enunciado incluye código con errores que hay que identificar, justificar y corregir.